The aim of this project is to construct a single phasing monitor and prevention system using 8-bit microcontroller. Anti-single phasing relays or single phasing preventer are required for critical loads and circuits. These are required because the normal overload protection doesn't trip on time. For large air-conditioning compressors, irrigation pumps these are sometimes, included.
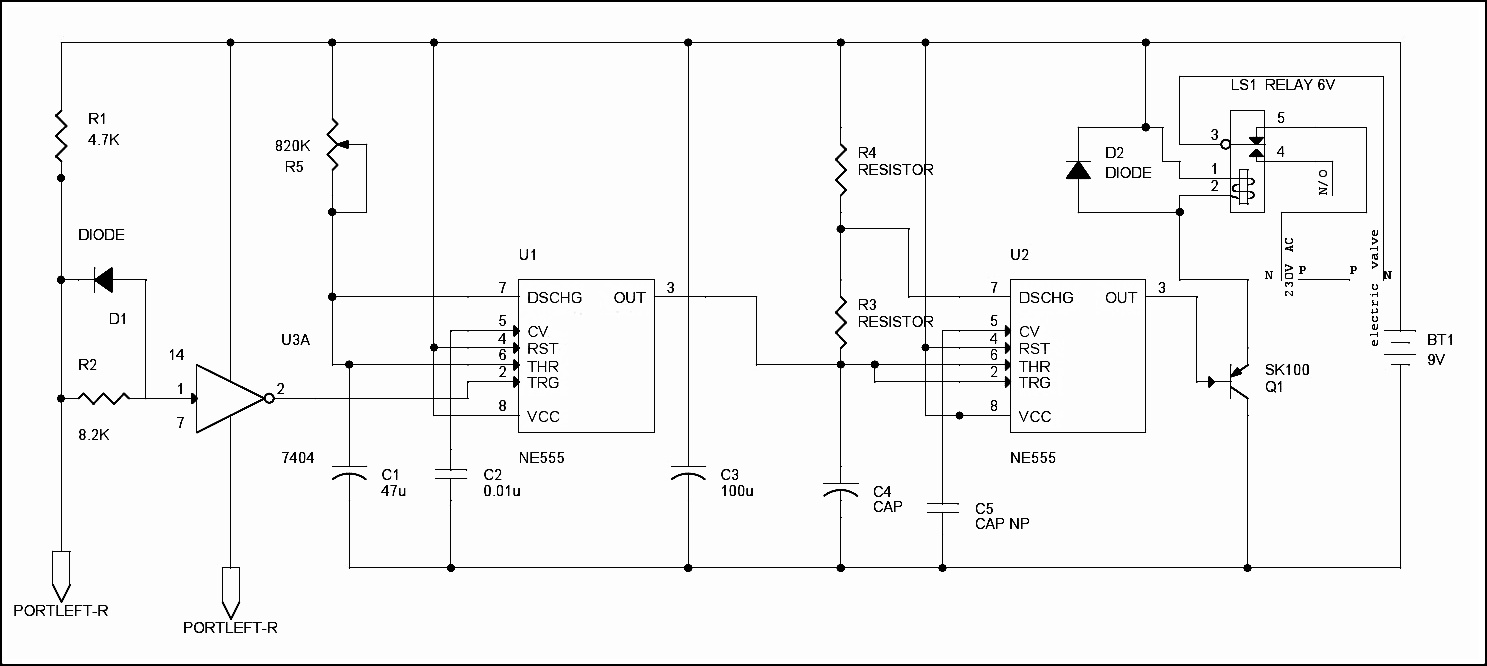
The purpose of this project is to develop an intelligent system that continuously monitors all the three phase voltages (High voltage AC) and if any of these three phases is disconnected then this system takes the preventive action. The preventive action could be disconnecting the power supply immediately to the load by operating an electromagnetic relay. This system also alerts the user using visual or audible indicators.
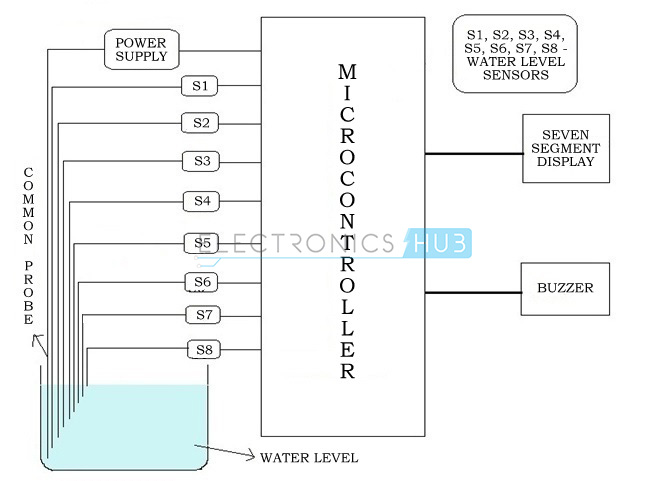
This system consists of three optically isolated high voltage sensors for sensing the presence of high voltage in the respective circuits. One of the voltage sensors is connected to phase line of the supply and the other is connected to neutral line. A micro controller based control system continuously monitors the voltage in all the three phases of the power supply circuit. In ideal conditions all the three phases gets the same voltage. The visual indicators display the health status of all three phases (Red, Yellow and Green). But, when any of the phases gets disconnected then in such situations the micro controller-based system alerts the user about this in the form of visual or audible alerts.