1. Quadrics network
2. Worldwide Inter operatibility for Microwave Access
3. Fpga offloads dsp?s.
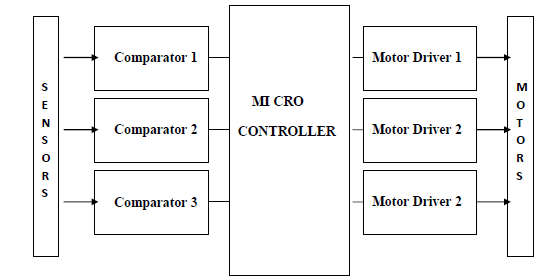
4. Real-Time Obstacle Avoidance
5. Light emitting polymers
6. E-Commerce
7. Extreme ultraviolet lithography*
8. Low Power UART Design for Serial Data Communication
9. Multi threading microprocessors
10. Passive Millimeter-Wave
11. Magnetic Resonance Imaging
12. Microelectronic Pills~
13. Multisensor Fusion and Integration
14. Molecular Electronics
15. Money Pad, The Future Wallet
16. Treating Cardiac Disease With Catheter-Based Tissue Heating
17. Adaptive Multipath Detection4
18. Heliodisplay
19. Virtual Reality~
20. Real Time System Interface
21. Wireless LED
22. Real-Time Image Processing Applied To Traffic
23. Class-D Amplifiers
24. Radiation Hardened Chips
25. Time Division Multiple Access
26. Embryonics Approach Towards Integrated Circuits
27. Cellular Digital Packet Data (Cdpd)
28. EC2 Technology
29. Crusoe Processor
30. Swarm intelligence & traffic Safety
31. Software Radio3
32. Integrated Power Electronics Module
33. Power System Contingencies
34. e-Paper Display
35. VISNAV
36. Push Technology
37. Distributed Integrated Circuits
38. Electronics Meet Animal Brains
39. Navbelt and Guidicane
40. Orthogonal Frequency Division Multiplexing
41. Organic LED
42. Optical networking
43. Tunable Lasers
44. Code Division Duplexing
45. Satellite Radio TV System
46. Code Division Multiple Access
47. Project Oxygen
48. Robotic balancing..
49. Integer Fast Fourier Transform
50. Daknet
51. Cryptography~
52. 3- D IC's
53. Continuously variable transmission (CVT)
54. Fibre Optic Communication~
55. AC Performance Of Nanoelectronics
56. Continuously variable transmission (CVT)
57. Intel express chipsets.
58. Military Radars
59. Moletronics- an invisible technology
60. Significance of real-time transport Protocol in VOIP
61. Acoustics
62. Testing cardiac diseased based on catheter based tissue heating
63. Cellular Through Remote Control Switch
64. Touch Screens
65. Implementation Of Zoom FFT in Ultrasonic Blood Flow Analysis
66. FRAM
67. The Bionic Eye
68. Synchronous Optical Network
69. Satellite Radio
70. Nanotechnology
71. Fault Diagnosis Of Electronic System using AI
72. Asynchronous Chips
73. E-Nose
74. Holographic Data Storage
75. MILLIPEDE7
76. Crystaline Silicon Solar Cells
77. Space Robotics
78. Guided Missiles
79. Synchronous Optical Networking
80. Cyberterrorism
81. Plasma Antennas
82. Welding Robots
83. Laser Communications
84. Architectural requirements for a DSP processer
85. High-availability power systems Redundancy options
86. Utility Fog
87. GMPLS
88. DSP Processor
89. e-governance.
90. Smart Pixel Arrays
91. The mp3 standard.
92. Resilient Packet Ring RPR.
93. Fast convergemce algorithms for active noise control in vehicles
94. Thermal infrared imaging technology
95. HAAPS
96. ISO Loop magnetic couplers
97. Evolution Of Embedded System
98. Guided Missiles
99. Iris Scanning
100. QoS in Cellular Networks Based on MPT
101. Vertical Cavity Surface Emitting Laser
102. Driving Optical Network Evolution
103. Home Audio Video Interpretability (HAVi)
104. Sensotronic Brake Control
105. Cruise Control Devices
106. Zigbee - zapping away wired worries
107. Global Positioning System~
108. Passive Millimeter-Wave
109. High-availability power systems Redundancy options
110. Light emitting polymers
111. Advanced Mobile Presence Technology
112. Resilient packet ring rpr.
113. Electronic Road Pricing System~
114. CorDECT
115. Artificial neural networks based Devnagri numeral recognitions by using S.O.M
116. Dig Water
117. Fusion Memory
118. Military Radars
119. Satellite Radio TV System
120. Landmine Detection Using Impulse Ground Penetrating Radar
121. low Quiescent current regulators
122. Stream Processor
123. Wireless communication
124. Object Oriented Concepts
125. Internet Protocol Television
126. RTOS ? VXWORKS2
127. MOCT
128. VLSI Computations
129. Terahertz Transistor
130. Integer Fast Fourier Transform
131. Surface Mount Technology
132. The Vanadium Redox Flow Battery System5
133. Terrestrial Trunked Radio
134. Fuzzy Logic
135. Dual Energy X-ray Absorptiometry
136. Cellular technologies and security.
137. Automatic Number Plate Recognition
138. Turbo codes.
139. CRT Display
140. HVAC
141. Ultra wide band technology.
142. GPRS
143. Optical Switching
144. VCSEL
145. Organic Light Emitting Diode
146. Orthogonal Frequency Division Multiplexing
147. Time Division Multiple Access
148. Elliptical curve cryptography ECC
149. Service Aware Intelligent GGSN
150. Space Time Adaptive Processing
151. Wireless LED
152. Blast
153. Radio Astronomy
154. Quantum cryptography
155. Organic Electronic Fibre
156. Fundamental Limits Of Silicon Technology
157. Digital Audio's Final Frontier-Class D Amplifier
158. Bluetooth based smart sensor networks
159. Optical Camouflage